7 · Afstand meten met de HC-SR04 ultrasoon geluidsensor
Leerdoelen
- ✓ Werking HC-SR04 ultrasoon afstand sensor
Benodigde componenten
- 1× Arduino
- 1× Breadboard
- 4× Jumper wire (man-man)
- 1× HC-SR04 ultrasoon afstand sensor
Onderdelen kopen
- $ 12.21 Arduino Uno (kloon)
- $ 13.77 Arduino Uno (kloon)
- $ 21.92 Arduino Uno SMD (origineel)
- $ 21.22 Arduino Uno Chip (origineel)
- $ 9.82 3x breadboard
- $ 2.43 1x breadboard klein
- $ 5.30 1x breadboard groot
- $ 3.94 1x breadboard groot
- $ 14.61 HC-SR04 ultrasoon afstand sensor
- $ 2.11 HC-SR04 ultrasoon afstand sensor
Introductie
Benieuwd hoe je een ultrasoon geluidsensor kunt uitlezen? In de deze Nederlandstalige Arduino tutorial voor beginners leg ik je dit precies uit 😃
Lesmateriaal
Onderaan op deze pagina vind je de knop lesmateriaal waarmee je het lesmateriaal kunt downloaden. Dit materiaal bestaat uit de code, schakelschema en andere bestanden die in de les worden gebruikt.
Ultrasoon geluid
Ultrasoon geluid is geluid wat wij als mensen niet kunnen horen. De frequentie is simpelweg te hoog. Er zijn wel dieren die dit geluid kunne horen zoals vleermuizen, honden en dolfijnen. Zo geeft bijvoorbeeld een hondenfluitje een ultrasoon geluid.
HC-SR04 ultrasoon sensor
In deze les maken we gebruik van de HC-SR04 ultrasoon afstandssensor Deze maakt gebruik van ultrasoon geluid om een afstand te bepalen.

De sensor heeft twee "ogen", ieder gemarkeerd met een letter:
Tis de zender (Transmitter)Ris de ontvanger (Receiver)
Voorwerpen weerkaatsen ultrasoon geluid. Doordat deze sensor geluid kan zenden ontvangen is het mogelijk de afstand te berekenen. Dit doet hij door geluid uit te zenden en vervolgens te meten hoe lang het duurt voordat de ontvanger dit geluid terug hoort. Het is bekend hoeveel afstand geluid in een bepaalde tijd kan afleggen. Op deze manier kunnen we aan de hand van de verstreken tijd tussen zenden en ontvangen, berekenen wat ongeveer de afstand is.
De sensor heeft naast de bekende 5V en GND nog twee speciale pins: Trig en Echo. Als de trigger pin HIGH is begint de HC-SR04 sensor met zenden. De echo pin wordt HIGH als de ontvanger geluid ontvangt.
💡 Het is belangrijk dat we straks de berekende afstand door 2 delen. Het geluid is immers eerst naar het object toegegaan en daarna teruggekaatst. De afstand is dus 2x afgelegd.
De schakeling
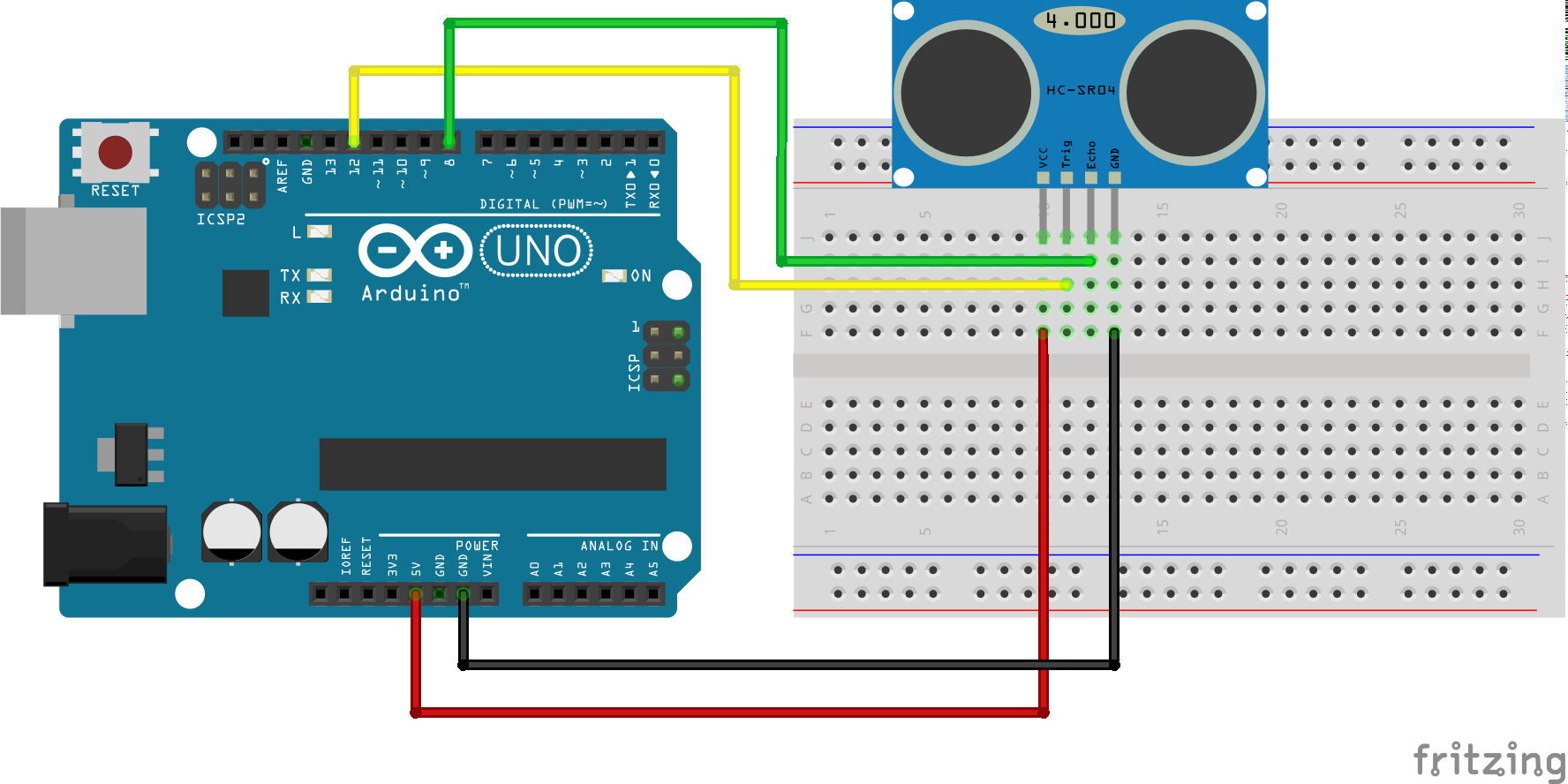
Druk de HR-SR04 in het breadboard en sluit de volgende jumper wires aan:
- De
5Vop de Arduino -> de linker pin van de sensor - De
12op de Arduino -> de trig pin van de sensor - De
8op de Arduino -> de echo pin van de sensor - De
GNDop de Arduino -> de rechter pin van de sensor
Arduino Code
We beginnen de code met het definiëren van drie variabelen:
1 const int trigPin = 12;
2 const int echoPin = 8;
3
4 float duration;
5 float distance;
trigPinis de pin waarop we detriggerhebben aangeslotenechoPinis de pin waarop we deechohebben aangeslotendurationis de verstreken tijddistanceis de gemeten afstand
setup()
1 void setup() {
2 Serial.begin(9600);
3 pinMode(trigPin, OUTPUT);
4 pinMode(echoPin, INPUT);
5 }
Als eerste initialiseren we de seriële monitor. Daarna stellen we de trigPin in als uitvoer en de echoPin als invoer.
loop()
1 // Herhaal oneindig
2 void loop() {
3 digitalWrite(trigPin, LOW);
4 delayMicroseconds(2);
5
6 digitalWrite(trigPin, HIGH);
7 delayMicroseconds(10);
8 digitalWrite(trigPin, LOW);
9
10 duration = pulseIn(echoPin, HIGH);
11 distance = (duration * 0.0343) / 2;
12
13 Serial.print("Afstand: ");
14 Serial.println(distance);
15
16 delay(100);
17 }
delayMicroseconds()
In de code zien we een nieuwe functie delayMicroseconds(). Eerder maakte we al gebruik van delay() deze pauzeert een aantal milliseconden. De delayMicroseconds() is nog wat preciezer en pauzeert in microseconden.
Uitleg code
De loop() functie bestaat uit 4 delen:
trigPinvoorbereiden- Meting starten
- Duur en afstand berekenen
- Data naar seriële monitor sturen
We beginnen met er zeker van zijn dat trigPin op LOW wordt ingesteld en dus niet aan het zenden is. Hierna kunnen we beginnen om 10 microseconden ultrasoon geluid uit te zenden. Dit doen we door trigPin op HIGH in te stellen en vervolgens met delayMicroseconds() pauzeren. Daarna stoppen we het zenden door de trigPin weer op LOW in te stellen. Het geluid is weggestuurd en nu wachten we totdat het geluid terugkomt.
pulseIn()
De pulseIn() functie is een speciale functie om de lengte van een puls te meten. Deze kan een wisseling van LOW naar HIGH zijn, of omgekeerd. pulseIn() heeft 3 parameters waarvan de laatste optioneel is:
- pinnummer waar de puls van gelezen wordt
- het type puls om uit lezen:
LOWofHIGH - aantal microseconden om te wachten tot de puls start
Als we in onze code kijken dan zien we:
1 pulseIn(echoPin, HIGH);
Dit betekend dat we wachten totdat de echoPin van LOW naar HIGH gaat. Zoals hieronder schematisch is weergegeven:

Zodra deze verandering wordt waargenomen begint het meten van de verstreken tijd. De timer stopt als de waarde weer terug veranderd van HIGH naar LOW.
We kunnen ook het omgekeerde doen:
1 pulseIn(echoPin, LOW);
In dit geval wachten we totdat de pin van HIGH naar LOW veranderd en starten dan de meting.

Afstand meten
Nu we weten hoe pulseIn() werkt, is onderstaande code makkelijk te begrijpen.
1 duration = pulseIn(echoPin, HIGH);
2 distance = (duration * 0.0343) / 2;
We beginnen met het meten van hoe lang het geluid onderweg is geweest. Hiervoor zetten we pulseIn() op de echoPin, en wachten totdat het geluid terugkomt. We weten nu de tijd tussen het verzenden en ontvangen van het geluid. Dit slaan we op in duration.
Om de afgelegde afstand te berekenen moeten we eerst de snelheid van het geluid weten. Deze is 343 meter per seconde. Dit gelijk aan 0.000343 meter per microseconde.
We willen echter het aantal centimeters per microseconde weten. Een meter is 100 centimeter. Dus vermenigvuldigen we 0.000343 met 100. Zo komen we op 0.0343 centimeter per seconde.
Omdat het geluid de afstand twee keer aflegd, moeten we deze waarde door 2 delen om de afstand in centimeters te krijgen.
🎓 Met hoeveel hadden we moeten vermenigvuldigen om de afstand in millimeters te krijgen?
Code uploaden naar Arduino
Ons programma is nu klaar om naar de Arduino te worden gestuurd. Open hierna de seriële monitor:

Beweeg nu je hand van de sensor af en naar de sensor toe. Als het goed is zie je de afstand tot je hand in de seriële monitor.

